Installation
git clone https://github.com/ElektorLabs/CaptureCount.git
cd CaptureCount/yolo
wget https://pjreddie.com/media/files/yolov3.weights
sudo apt install python3-opencv
sudo apt install python3-numpy python3-pandasCode
Largement inspiré de https://github.com/ElektorLabs/CaptureCount
# coding: utf-8
# Working Object Tracker V1.2, adapted from https://www.learnopencv.com/deep-learning-based-object-detection-using-yolov3-with-opencv-python-c/
# This script will detect objects in a picture
import cv2
import pandas as pd
import time
from datetime import datetime
import numpy as np
# Load pre-trained model and configuration
model = './yolo/yolov3.weights' # Change this to your model's path
config = './yolo/yolov3.cfg' # Change this to your config file's path
net = cv2.dnn.readNetFromDarknet(config, model)
# Load class names
classes = []
with open("./yolo/coco.names", "r") as f: # Change to the path of your coco.names file
classes = [line.strip() for line in f.readlines()]
# Function to get output layers
def get_output_layers(net):
layer_names = net.getLayerNames()
return [layer_names[i - 1] for i in net.getUnconnectedOutLayers().flatten()]
# Function to draw bounding box
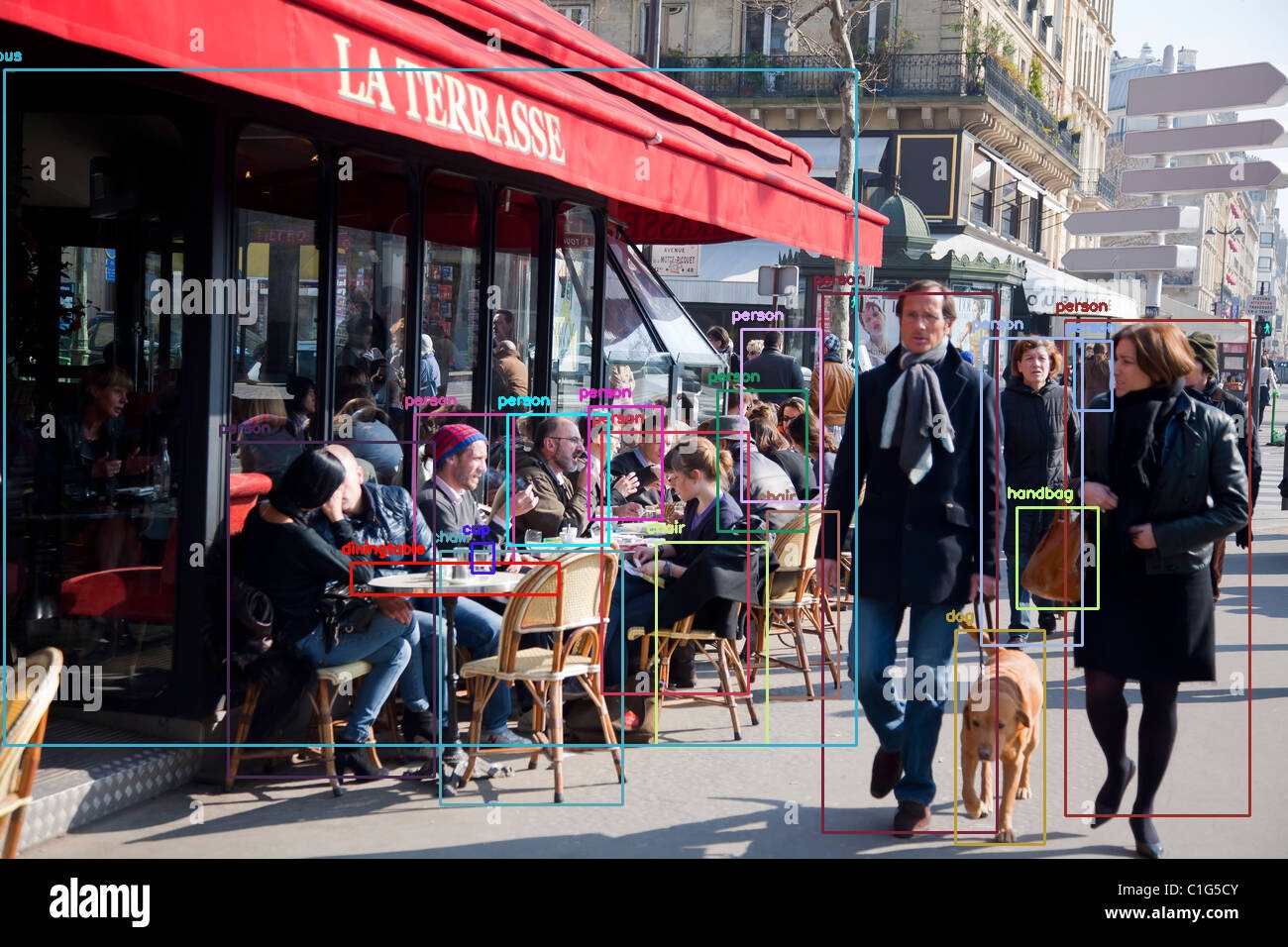
def draw_bounding_box(img, class_id, confidence, x, y, x_plus_w, y_plus_h):
label = str(classes[class_id])
color = np.random.uniform(0, 255, size=(3,))
cv2.rectangle(img, (x, y), (x_plus_w, y_plus_h), color, 2)
cv2.putText(img, label, (x-10, y-10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, color, 2)
frame = cv2.imread('chat.png')
Width = frame.shape[1]
Height = frame.shape[0]
scale = 0.00392
# Create a blob and pass it through the model
print("Creating a blob...")
blob = cv2.dnn.blobFromImage(frame, scale, (416, 416), (0, 0, 0), True, crop=False)
net.setInput(blob)
outs = net.forward(get_output_layers(net))
print("Blob created.")
# Process the outputs
class_ids = []
confidences = []
boxes = []
conf_threshold = 0.5
nms_threshold = 0.4
for out in outs:
for detection in out:
scores = detection[5:]
class_id = np.argmax(scores)
confidence = scores[class_id]
if confidence > conf_threshold:
center_x = int(detection[0] * Width)
center_y = int(detection[1] * Height)
w = int(detection[2] * Width)
h = int(detection[3] * Height)
x = center_x - w / 2
y = center_y - h / 2
class_ids.append(class_id)
confidences.append(float(confidence))
boxes.append([x, y, w, h])
indices = cv2.dnn.NMSBoxes(boxes, confidences, conf_threshold, nms_threshold)
for i in indices:
box = boxes[i]
x = box[0]
y = box[1]
w = box[2]
h = box[3]
draw_bounding_box(frame, class_ids[i], confidences[i], round(x), round(y), round(x+w), round(y+h))
print("Box",i,"added.")
cv2.imwrite('chat.cv.png',frame)Avant/Après